El método científico es un proceso ordenado para investigar y resolver problemas, basado en observación, hipótesis, experimentación, análisis de resultados y conclusiones.
Podemos usar el método científico en casi todo lo que hagamos 🚀: para mejorar un robot de Lego Spike Prime, crear un puente más fuerte con piezas, programar un sensor que detecte objetos, o incluso descubrir por qué una planta crece más rápido en un lugar que en otro 🌱
Siempre que tengamos una pregunta, una idea y queramos probarla, el método científico es nuestra herramienta secreta 🔍.o. Imagina que el método científico es como ser un detective de robots 🕵️🤖 con tu set de Lego Spike Prime.
Observa 👀: Mira qué está pasando con tu robot. ¿Se mueve? ¿Hace ruidos raros?
Pregunta ❓: “¿Por qué mi robot gira solo a la izquierda?”
Imagina una respuesta (Hipótesis) 💡: “Creo que el motor derecho está más rápido que el izquierdo.”
Prueba (Experimenta) 🔧: Cambias el programa y ajustas los motores.
Mira los resultados 📊: ¿Ahora va recto?
Conclusión 🏆: Si funciona, genial. Si no… ¡volvemos a investigar!
Así, paso a paso, usas tu mente de científico para que tu robot sea el mejor de la clase 🚀.

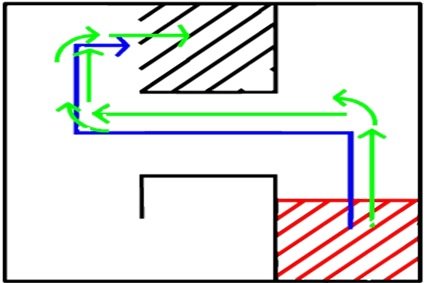
Esquema de una posible solución
Observemos el esquema que propone una posible solución:
- El robot debe avanzar hacia adelante.
- Luego, realizar un giro.
- Continuar hacia adelante nuevamente.
- Girar otra vez.
- Avanzar nuevamente.
- Realizar un último giro.
- Finalmente, avanzar hasta llegar al destino.
Aunque esta idea parece una solución básica, carecemos de información clave para que sea completamente funcional. Debemos de aplicar el método científico en nuestro proceso de solución, entonces analizamos...
¿Qué significa avanzar hacia adelante?
- No sabemos con claridad la distancia exacta que el robot debe recorrer en cada paso.
¿En qué dirección debemos girar?
- Es necesario determinar si el giro debe ser hacia la derecha o hacia la izquierda, dependiendo del diseño del laberinto.
¿Cuántos pasos o qué medidas debe tomar el robot?
- La cantidad de unidades de movimiento en cada dirección es crucial para que el robot siga correctamente el camino.
📝 Escribe paso a paso cómo resolviste el reto en tu cuaderno de trabajo y luego presenta tu solución al grupo. ¡Tu idea puede inspirar a otros!
Cómo llevar el robot de la zona roja a la zona negra usando el método científico
1. Observación
Tenemos un mapa con:
Zona roja: punto de partida del robot.
Zona negra: objetivo final.
Pasillos por donde el robot puede avanzar.
Paredes que bloquean el camino directo y obligan a dar giros.
2. Pregunta
¿Cómo puede el robot llegar desde la zona roja hasta la zona negra siguiendo un recorrido seguro y sin chocar contra las paredes?
3. Hipótesis
Si el robot avanza y gira siguiendo distancias y ángulos previamente calculados, podrá llegar a la zona negra de forma precisa sin usar sensores.
4. Plan (Experimento)
- Salir desde la zona roja y avanzar 10 cm en línea recta. Detener el robot.
- Girar 90° a la izquierda. Detener el robot.
- Avanzar 25 cm por el pasillo hasta la siguiente esquina. Detener el robot.
- Girar 90° a la derecha. Detener el robot.
- Avanzar 10 cm. Detener el robot.
- Girar 90° a la derecha. Detener el robot.
- Avanzar 5 cm hasta entrar a la zona negra. Detener el robot.
5. Resultados esperados
El robot completa el recorrido y llega a la zona negra sin chocar, siguiendo con exactitud cada paso y giro del plan.
6. Conclusión
Planificar el recorrido y medir las distancias antes de mover el robot garantiza que llegue a su objetivo de forma segura. Este método demuestra que, con pasos claros y ordenados, se pueden resolver retos sin necesidad de sensores.
¡Has llegado al objetivo!
📝 Actividad: Preparando un jugo de limón con el método científico.
Pregunta inicial:
Anota tu proceso en la bitácora de trabajo y comparte tu solución con el resto de la clase
¿Cómo podemos preparar un delicioso jugo de limón 🍋✨ siguiendo pasos organizados?
